Добрый день, на WBIO-DO-R10R-4 залипло реле. Двигает рулету только в одну сторону и не слышно как щелкает.
Выгорел первы канал, на видео включил на обоих каналах DIR + ON, и на втором звонится корректно, а на первом - нет.
Добрый день, на WBIO-DO-R10R-4 залипло реле. Двигает рулету только в одну сторону и не слышно как щелкает.
Выгорел первы канал, на видео включил на обоих каналах DIR + ON, и на втором звонится корректно, а на первом - нет.
Добрый день! Пожалуйста напишите недостающую информацию.
Например, нужно знать
(function() {
function addVirtualRollet(id, name, control, direction, timeout, buttons, fixed) {
var moving, virt = 'virtual-rollet-' + id.toLowerCase(), data = {};
// Инициализируем виртуальное устройство со служебными полями
defineVirtualDevice(virt, {
title: name,
cells: {
open: {title: 'Открыть', type: 'pushbutton', order: 1},
close: {title: 'Закрыть', type: 'pushbutton', order: 2},
stop: {title: 'Остановить', type: 'pushbutton', order: 3},
position: {title: 'Текущая позиция', type: 'value', forceDefault: true, units: '%', value: 0, max: 100, order: 4},
target: {title: 'Целевая позиция', type: 'range', forceDefault: true, value: 0, max: 100, order: 5},
state: {title: 'Состояние', type: 'text', value: 'STOPPED', readonly: true, forceDefault: true, order: 6}
}
});
// Работа с топиками напрямую через объект
function defineVar(name, path) {
Object.defineProperty(data, name, {
configurable: true,
get: function() { return dev[path]; },
set: function(value) { dev[path] = value; }
});
}
defineVar('position', virt + '/position');
defineVar('target', virt + '/target');
defineVar('state', virt + '/state');
defineVar('route', direction);
defineVar('power', control);
// Задание цели по командам от внутренних или внешних кнопок с режимами работы
defineRule(virt + '-trigger', {
whenChanged: [virt + '/open', virt + '/close', virt + '/stop'].concat(buttons),
then: function(click, device, command) {
if (!click && !fixed) return;
if (device !== virt)
{
command = (buttons.length == 1) ? 0 : buttons.indexOf(device + '/' + command) + 1;
switch (buttons.length)
{
case 1: data.target = (data.state !== 'STOPPED' || !click) ? data.position : (data.position > 0 ? 0 : 100); break;
case 2: data.target = (data.state !== 'STOPPED') ? data.position : (command == 2 ? 0 : 100); break;
case 3: data.target = (command == 3) ? data.position : (command == 2 ? 0 : 100); break;
default: log.warning('{}: only 1/2/3 buttons can be used to control!', virt);
}
}
else
{
data.target = {'open': 100, 'close': 0, 'stop': data.position}[command];
}
}
});
// Работа с приводом: установка целевой позиции и расчет таймингов
defineRule(virt + '-action', {
whenChanged: virt + '/target',
then: function(value) {
if (moving)
{
clearInterval(moving);
data.power = false;
}
if (data.position === data.target)
{
data.route = false;
data.state = 'STOPPED';
return;
}
else
{
data.route = data.target > data.position;
data.state = data.target > data.position ? 'OPENING' : 'CLOSING';
setTimeout(function() {
data.power = true;
moving = setInterval(function() {
if (data.position !== data.target)
{
data.position += data.route ? 1 : -1;
}
else
{
clearInterval(moving);
data.power = false;
data.route = false;
data.state = 'STOPPED';
}
}, Math.round(timeout / 100));
}, 50);
}
}
});
}
// Инициализация виртуальных роллет и правил через общую функцию (датчик открытия в алгоритме не предусмотрен, расчет только на таймингам)
// Параметры: ID уст-ва, наименование, канал управления мотором, канал управления направлением, время на полное открытие/закрытые, выключатели
// Выключатели: [..] (1 - open/stop/close, 2 - open/stop и close/stop, 3 - open, close, stop), `true` после если кнопки фиксируемые!
addVirtualRollet('1', 'Пергола', 'wb-mio-gpio_138:3/ON1', 'wb-mio-gpio_138:3/DIR1', 34000, ['wb-mio-gpio_138:1/IN10', 'wb-mio-gpio_138:1/IN11']);
addVirtualRollet('2', 'Штора (роллета 2)', 'wb-gpio/EXT1_ON2', 'wb-gpio/EXT1_DIR2', 34000, ['wb-gpio/EXT2_DR3', 'wb-gpio/EXT2_DR4']);
})();
Что-то дала эта информация?
Здравствуйте.
Как долго у Вас работал данный электромотор с релейным модулем?
Возможно произошло залипание контакта реле из-за высоких пусковых токов электропривода.
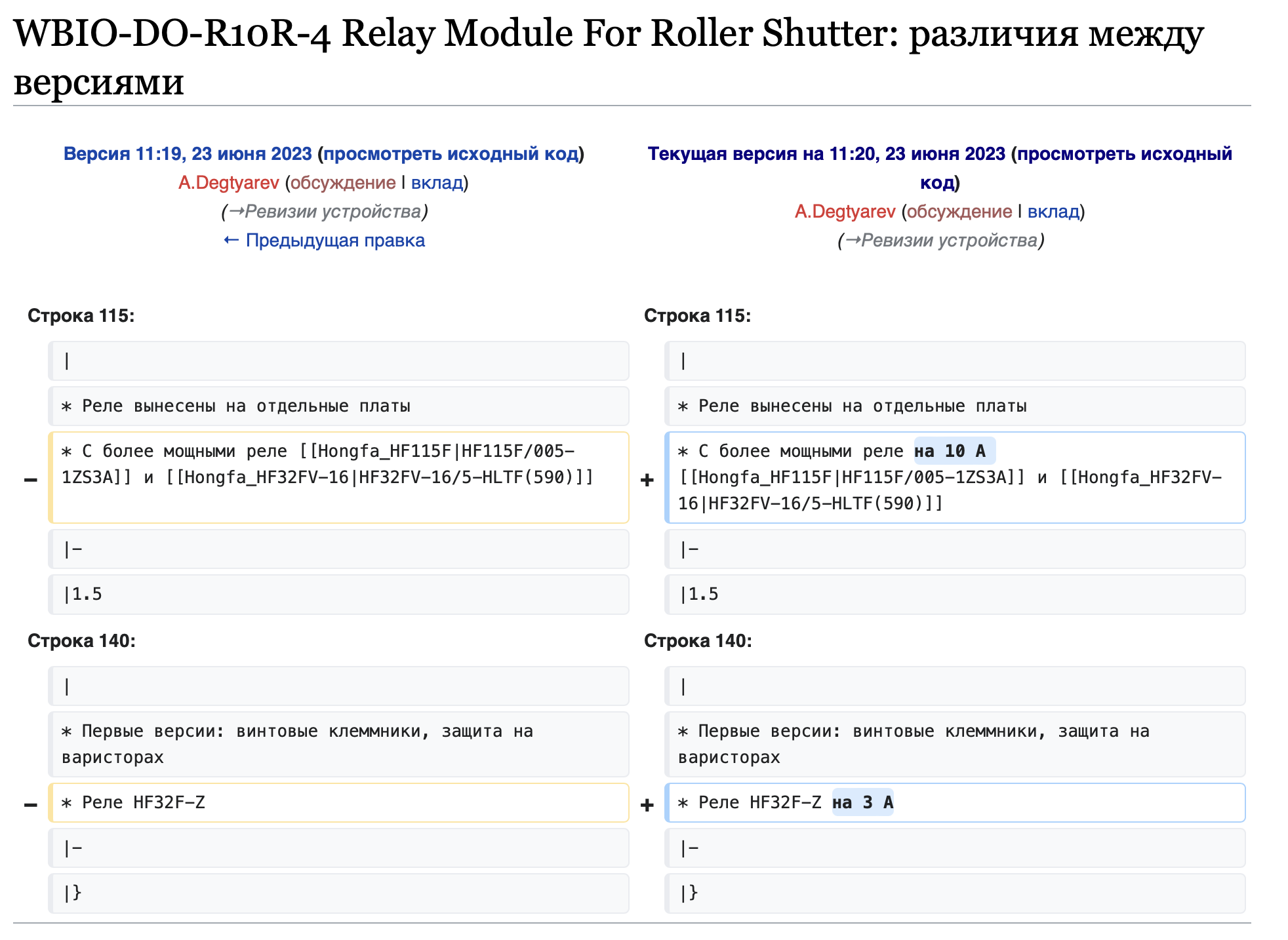
Согласно документации - Модуль релейных выходов для управления роллетами WBIO-DO-R10R-4 — Wiren Board допустимый ток коммутации равен 3 А для резистивной нагрузки и напряжения 230 V AC.
На шильде электромотора указан номинальный ток 1,43 А, пусковой ток 5-кратный, что соответствует 1,43*5=7,15 А, что является превышением по допустимой нагрузки на реле.
Также, если механизм не новый, то могли износиться подшипники электромотора, что также вызовет увеличение тока нагрузки из-за увеличения силы трения на валу.
Для электроприводов, во время подбора оборудования, рекомендуется учитывать пусковые токи и ставить в цепь предохранители согласно допускам указанным в паспорте релейного модуля. Либо выносить нагрузку на промежуточное реле или компактный контактор.
Двигатель новый, поработал 2-3 раза в разные стороны и реле залипло. По поводу пусковых токов - это сейчас ваши догадки, также как и в документации к реле об этом ни слова не сказано.
Учитывая вышесказанное я должен выкинуть десяток реле для штор купленный у вас и заменить контакторами, такое ваше решение?
Во-первых - нету ни места ни желания этого делать, во-вторых все темы на данном форуме за последние несколько лет связанные с модулем штор - почти все проблема одна и та же - они горят, залипают и тд, однако в документации также ни слова за это время не добавилось, что допустим двигатель на шторе должен быть игрушечный на 5W чтобы он выдержал, иначе грозит выгоранием/залипанием.
В документации к реле указан “ток коммутации для резистивной нагрузки”. При покупке любого устройства, коммутирующего электрические цепи, вы должны учитывать и номинальный ток, и пусковой. Я, при отсутствии информации о пусковом токе у конкретной железки, принимаю его семикратным (как и большинство проектировщиков электрики). Плюс нагрузка у вас не резистивная, а индуктивная, т.е. номинальный ток будет выше на величину коэффициента мощности. При отсутствии на шильдике информации я бы принял этот коэффициент за 0.6, тогда номинальный ток для выбора коммутационного аппарата будет 1.43/0.6 = 2.4, а пусковой 2.4 * 7 = 16.8. Сами видите, что для вашего двигателя WBIO-DO-R10R-4 никак не подходит.
Ну и еще есть наши рекомендации по подбору оборудования:
https://wirenboard.com/wiki/WB_FAQ/wb-equipment-selection
в которых написано следующее:
Ну так и напишите максимальный пусковой ток в документации. На реле ведь у вас описано (пример WB-MRWL3 или другой).
Снаббер +предохранитель я заказал и установлю, но есть сомнения что это поможет, тк в большинстве тем про данный модуль - решение купить реле WB-MRWL3 или другое и на него переписать правило + навешать сбаббер + предохранитель или вообще поставить контактор.
Я говорю это не просто так, модули штор я пытаюсь ваши заставить работать еще с ревизии в которых стояли варисторы (они благополучно выгорели и вместе с ними выгорел дорогой двигатель), теперь начинаются залипания.
Учитывая вашу математику выше, максимальная мощность двигателя для данного реле выходит 160 Вт. Те 160 Вт / 230В * 0,6 * 7 = 3A. Если это так, тогда напишите в документации и вопросов больше не будет и добавьте в опции при заказе: снаббер, предохранитель и тд для более мощных двигателей.
Написано - 3 А на резистивной нагрузке. Принцип простой: не написан отдельно пусковой ток - не превышаем номинальный ни в каком режиме.
Так неправильно. Двигатель двигателю рознь, есть двигатели с коэффициентом мощности близким к единице, и пусковым током тоже близким к единице. Если есть данные на двигатель, надо считать по ним.
Мы продаем далеко не все из того, что может потребоваться в электроустановке.
Давайте наверно отмотаем к истокам когда данные модули покупались пару лет назад - покупалось сразу и много. Тогда в документации не было речи ни о снабберах, ни о предохранителях ни даже по максимальном токе если мне не изменяет память не было речи. Они были на варисторах и при первом же запуске сгорели и были благополучно заменены по гарантии. Версия без варисторов актуальная также в описании не было ничего и никаких предупреждений.
Удобно ссылаться на то что было добавлено в документацию недавно по учету других тем. Но я вашу позицию понял, ваши про проблемы - это ваши проблемы.
Спасибо за внимание.
Здравствуйте, это не так. В документации у нас действительно невнятно написано и ваше возмущение понятно. У вас один сгоревший модуль?
Они выпускаются с марта 2023 года, доступны в интернет-магазине.
Да один.
Давайте мы бесплатно поменяем вам оборудование. Курьер привезёт новое оборудование:
Для отправки напишите, пожалуйста, письмо на info@wirenboard.com.
В письме укажите: